01 — The Concept
A campus kart, built around our drivetrain
A compact, electric kart concept for moving students between distant buildings on UBC's campus. I proposed and led our team for our MECH 325 in designing a purpose-built drivetrain as the core of the vehicle, for a new student design team / engineering club based around campus mobility.
The current render uses a Krazy Kart base as a placeholder to visualize the concept. Currently in the progress of designing the chassis and remaining kart that will utilize the drivetrain.

02 — The Drivetrain
Four modules, one package
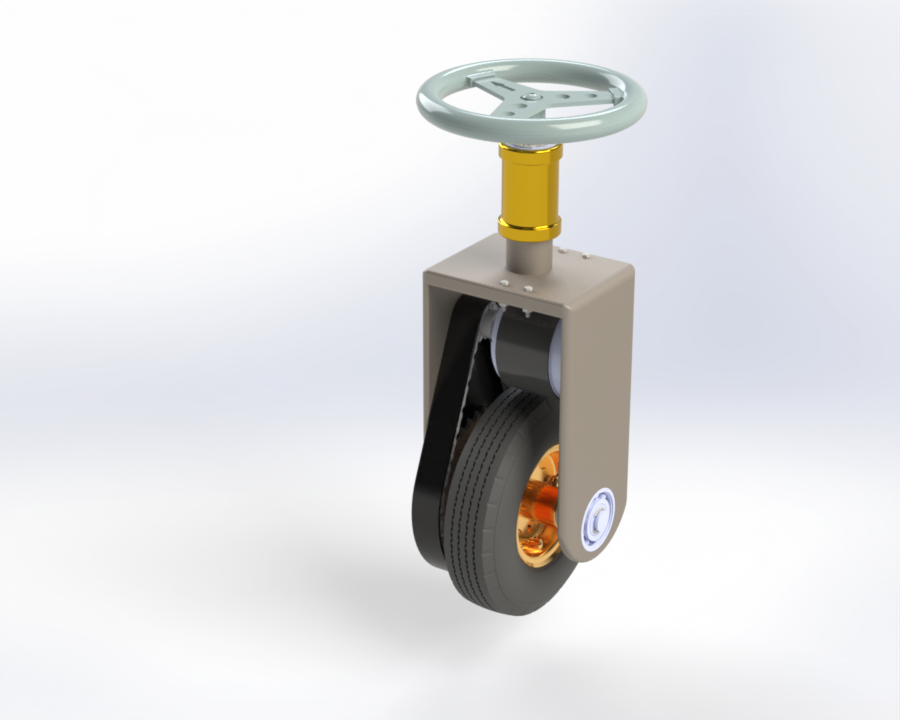
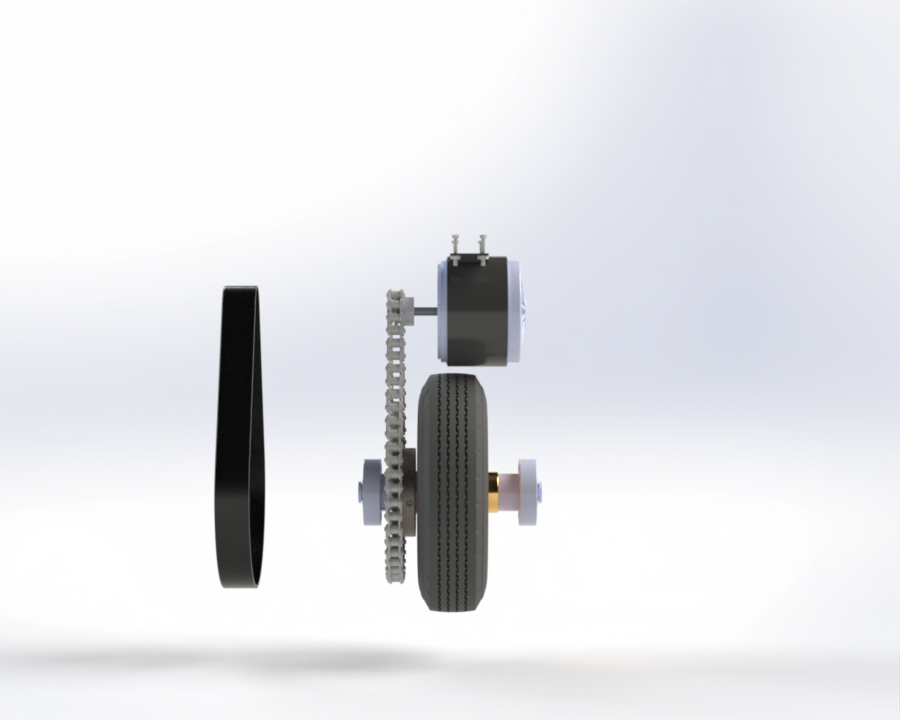
The drivetrain is broken into four modules that together drop into the chassis as one unit:
- Frame interface — an open-ended mount so the drivetrain can be clamped into a custom kart without dictating the rest of the chassis.
- Steering shaft — a bicycle-style fork, chosen for simplicity and proven geometry, riding on angular contact bearings.
- Motor and chain drive — a 750W brushless DC motor paired with a No. 40 chain drive, sized for 30 km/h with headroom for grade and acceleration.
- Wheel and shaft — a stepped steel shaft on sealed bearings, driving a single front wheel.
03 — In Progress
Redesigning the kart around the drivetrain
The drivetrain module is defined. The focus now is the kart itself, which I am rebuilding from scratch to host it properly.
What I am working on:
- A purpose-built chassis to replace the Krazy Kart placeholder
- Packaging the drivetrain and steering cleanly into the new frame
- FEA on frame welds and major load paths
- First build and a campus test run
